く__,.ヘヽ. / ,ー、 〉
\ ', !-─‐-i / /´
/`ー' L//`ヽ、
/ /, /| , , ',
イ / /-‐/ i L_ ハ ヽ! i
レ ヘ 7イ`ト レ'ァ-ト、!ハ| |
!,/7 '0' ´0iソ| |
|.从" _ ,,,, / |./ |
レ'| i>.、,,__ _,.イ / .i |
レ'| | / k_7_/レ'ヽ, ハ. |
| |/i 〈|/ i ,.ヘ | i |
.|/ / i: ヘ! \ |
kヽ>、ハ _,.ヘ、 /、!
!'〈//`T´', \ `'7'ーr'
レ'ヽL__|___i,___,ンレ|ノ
ト-,/ |___./
'ー' !_,.:
(1) 回顾你过去将近3年的学习经历
当初你报考的时候,是真正喜欢计算机这个专业吗?
并非如此,当时只是对其他的专业无感,没有太多的兴趣。
你现在后悔选择了这个专业吗?
并不后悔,当初填报志愿的时候选择了很多专业,最后觉得还是计算机比较适合,感觉几年前的自己对专业的理解太过狭隘,如今找到了自己想努力的方向还是非常开心的。
你认为你现在最喜欢的领域是什么(可以是计算机的也可以是其它领域)?
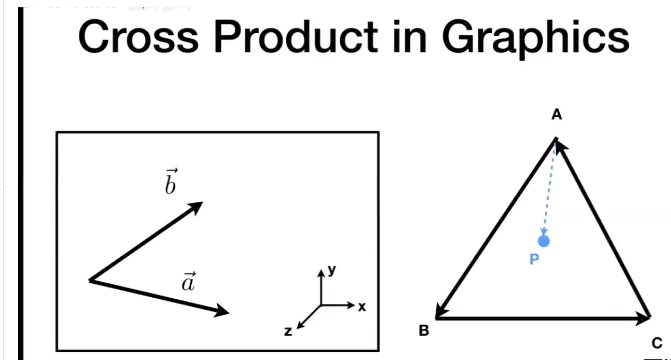
计算机图形学与3D技术,爱好绘画,热爱动漫文化。
(2) 总结你现在已经掌握的知识
你都具备了那些专业知识和能力?
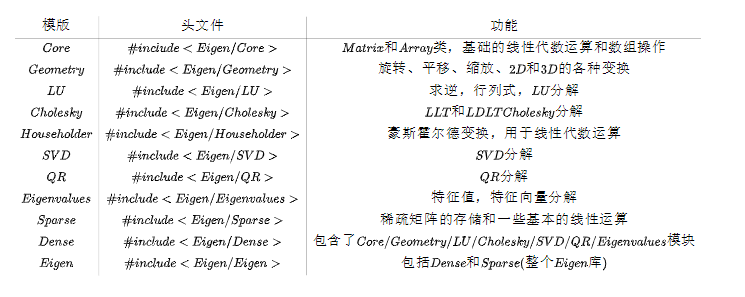
分析小问题和解决小问题,阅读文档,搜索资料,越是深入越觉得知识深似海底,自己不过是窥见了冰山一角,还有很多知识需要学习,列如UE4,Blender等3维软件的一些文档我如今还没看完。
你认为你已经为成为一个合格的计算机软件工程是做好准备了吗?
严格来说,思想准备倒是一直有,只不过目前深感技术和知识上的欠缺需要时间去弥补
在专业技术、个人能力以及其它方面你还有那些欠缺?
目前主要是阅读书籍和文档以及源代码,专业技术可能学的不太系统,打算之后有时间重新来一次,个人能力的话…我想想,欠缺的很多啊…
(3) 畅想未来
对照材料中前人的经历,你还准备从事计算机这个行业吗?
未来的事情谁都说不定,但是目前是这样打算的。
你认为与其它专业的同学相比,你的优势都有哪些?
个人有个人努力的方向,朝着自己喜欢的方向前进就好了。
对已经不远的将来,你的职涯规划是什么?
有打算成为一名Computer Graphic Programmer。
自嘲一般